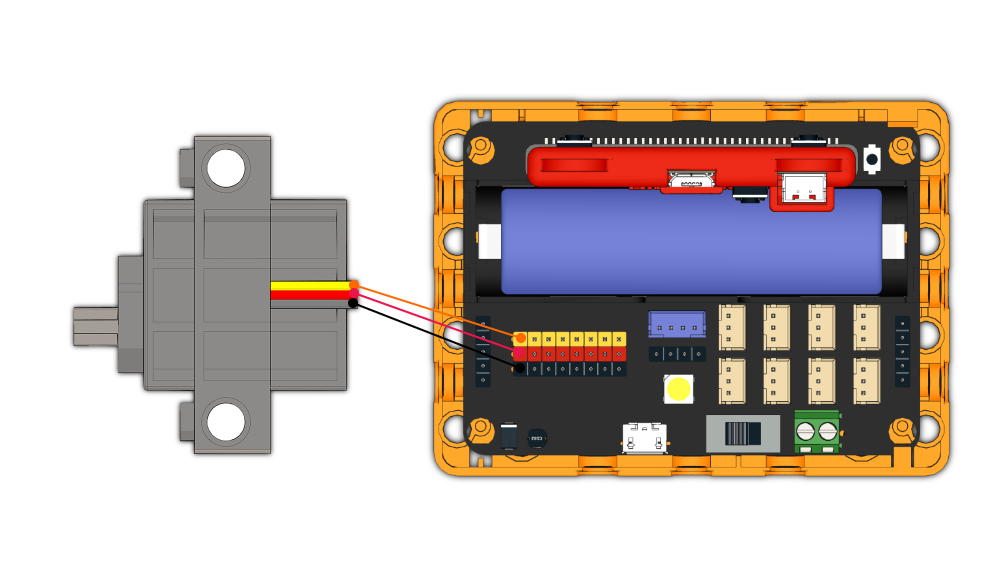
Connect the orange wire from the servo to the yellow wire of the Robotbit.
Typical servos have a rotation range of 0-180.
The programming blocks were designed for Kittenbot's 28BY-48-5V stepper motor, using other motors may result in reduced accuracy.
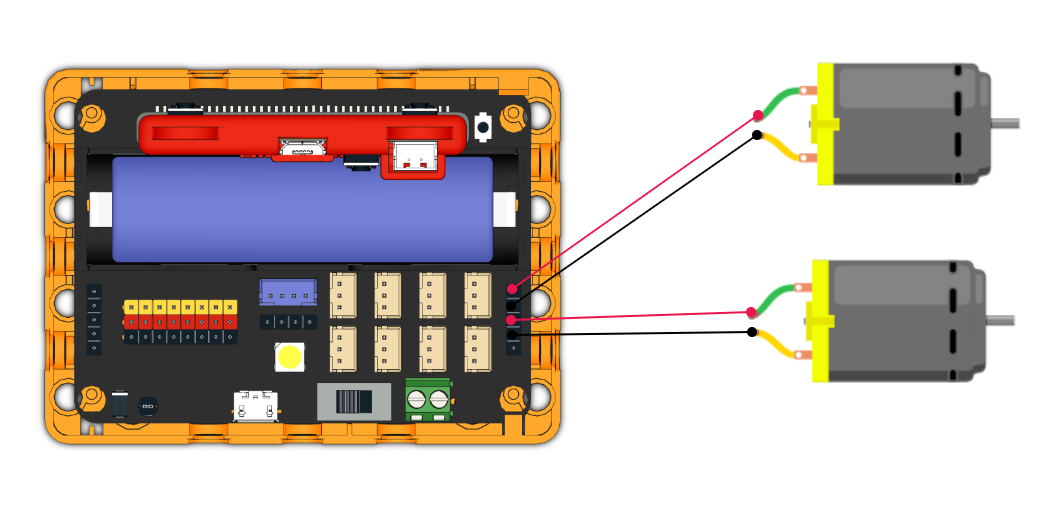
Stepper Motors have a rotation range of -360 to 360.
Remember to add a "Show" block to display the effect.(Except show color.)
RGB value has a range of 0-255.
HSL consists of a hue value with the range 0-360, a sturation and brightness value with the range 0-100.
The lights are labelled 0-3. (As labelled on the Robotbit)
The brightness level has a range of 0-255.
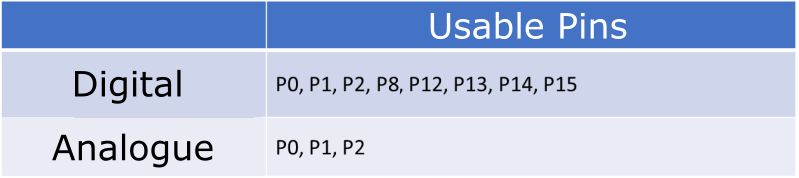
Pin 0-2 can be used as analog pins while P8, P12~P15 can only be used as digital pins.
Analog values have a range of 0 to 1023, digital values have a range of 0 to 1.
Pin 0 is occupied by the buzzer by default, the jumper should be removed when using this pin.
Pin 0 is occupied by the buzzer by default, the jumper should be removed when using this pin.